Category: Multirotor
-

Swift Hex – 300mm 3D Printed Hex Frame
Introducing the Swift Hex, a mini sized hexacopter that I designed and 3D printed, specifically for FPV. Its design was inspired by the Blackout Spider Hex, but seeing as it is currently unavailable, I decided to designed and make my own. It is exactly 300mm motor to motor. It uses 37mm spacers, just because that […]
-
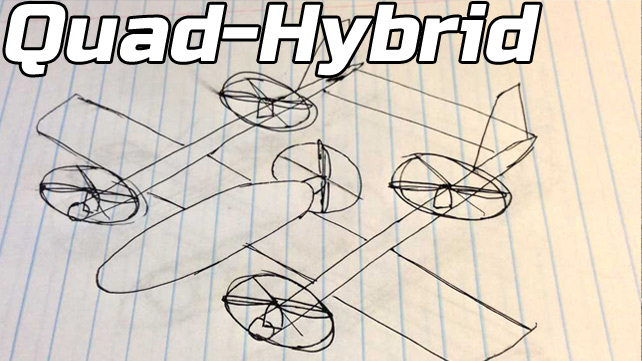
Quad-Glider Hybrid?
I’ve had an idea for quite some time now and right about now seems like the right time to execute. I’m pretty sure others have thought and built something similar to this, but I think I can do it quite well. The idea is to build a quad and airplane hybrid, like the picture above. […]
-

FPV in Las Vegas
Took a weekend trip to Las Vegas and took my ov3rquad with me. Check out the FPV flight around Vegas.
-

Ov3rquad – Top of the Mountain
High in the mountains of the San Fernando Valley in Southern California, I present my lastest FPV adventure. Filmed on a GoPro Hero 2 at 720p 120 fps on the always amazing Ov3rquad open-source quadrotor frame. I found a heliport at the top of the mountain with 3 helipads and I thought it would be […]
-

Ov3rquad at the Park
Check out my latest video from my latest multi-rotor platform, the Ov3rquad. The Ov3rquad is an open source spiderquad frame design, which I got custom cnc-cut out of lexan. It uses standard DJI 450/550 arms, 1000 kv motors, SimonK flashed 30-amp ESC and it is all controlled with an APM 2.5, which gives me gps […]
-

WEC Mark 2 – Test Flight
This is the second version of the WEC (Wooden Ecilop Clone). I improved the landing gear and streamlined the wiring by using a Quattro 20AMP ESC. The flight controller is an APM 2.5. I am using a 4-channel Frsky receiver in PPM mode soldered directly onto the APM to eliminate a lot of wiring. I […]
-

Tricopter Practice Flights
I’ll be the first one to admit that I’m not the greatest heli/multi pilot: I’ve hovered a lot and my skill where limited to just that, hovering and tail in-flights. I decided to improve my skills over the weekend and these are the results. I flew my tricopter at the local park for 12 batteries […]