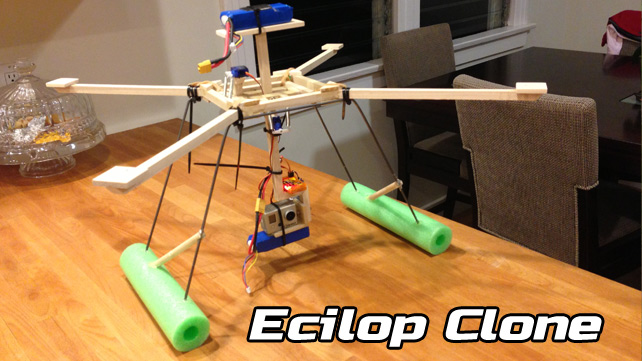
This is my attempt at a building an Ecilop, a gyro stabilized camera gimbal quadcopter. Construction is all poplar, CA and epoxy. This is the frame without any a flight controller, motors or ESC. I’ll be using the trusted ArduCopter 2.5.
The original inspiration came from Aleksey Zaitsevsky’s design, the Ecilop Easy, pictured below.

Also, here’s a video explaining its functionality.
The third model of the Ecilop drone from Aleksey Zaitsevsky on Vimeo.
I decided to build one out of wood just for the challenge of it. The next steps are to fine tune the quad and fly around to see what kind of results I get. Stay tuned!
Photo Gallery



